Revo - Current/Voltage Sensor Setup¶
Overview¶
This page describes how to setup a voltage/current sensor using a Revolution or Revolution Nano board.
Hardware Connections¶
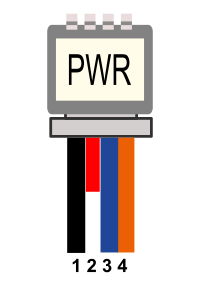
| Color | Connector pin (board) | Description | AttoPilot pin (sensor) |
|---|---|---|---|
| Black | 1 | GND | GND |
| Red | 2 | Vcc | Not used |
| Blue | 3 | Current input | I |
| Orange | 4 | Voltage input | V |
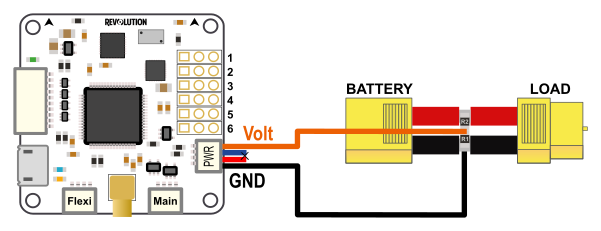
Basic voltage sensor¶
A basic voltage divider can be used, two resistors connected between ground and plus from battery.
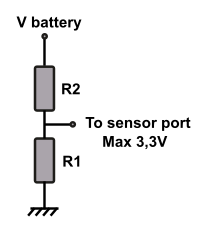
For a 4S battery (16.8Volts) the following values can be used:
- R1: 2,2 KOhms
- R2: 10 KOhms
With Vbattery = 16.8V, Vout = (16.8 * 2.2) / (10 + 2.2) = 3,03V
Current / Voltage sensor¶
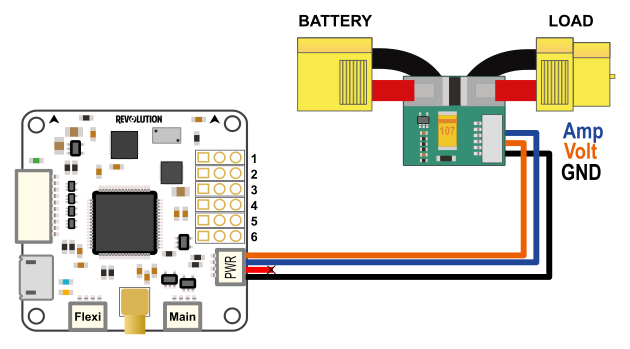
Here is a list of common Attopilot sensors that can be used:
| Module Type | Sensitivity | VoltageFactor | CurrentFactor | VoltageZero | CurrentZero |
|---|---|---|---|---|---|
| Attopilot 13.6V/45A | 242.3mV/V, 73.20mV/A | 4.127 | 13.661 | 0 | 0 |
| Attopilot 50V/90A [1] | 63.69mV/V, 36.60mV/A | 15.701 | 27.322 | 0 | 0 |
| Attopilot 50V/180A | 63.69mV/V, 18.30mV/A | 15.701 | 54.645 | 0 | 0 |
| [1] | Same as RCTIMER 90A current sensor |
For custom sensor see the Calculate SensorCalibration values section.
Hardware settings¶
The first thing to do is to configure the hardware settings:
- Connect the board to your computer and got to the System tab in your GCS
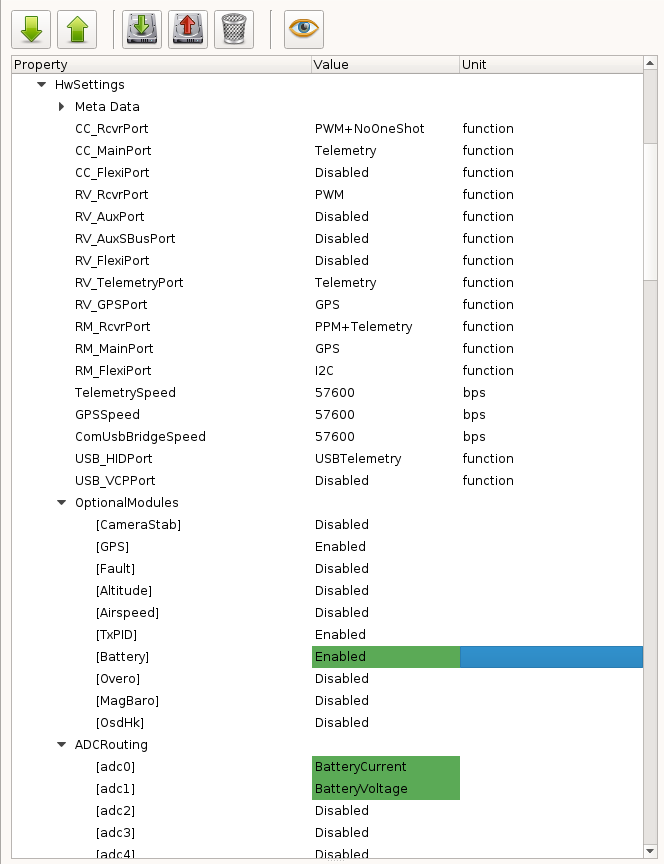
- Browse the first part (Settings) and find the HwSettings UAVObject
- Enable the Battery module: OptionalModules > Battery > Enable
- Set the analog input pins for voltage and current:
- ADCRouting > adc0 > BatteryCurrent
- ADCRouting > adc1 > BatteryVoltage
- Save changes, click Upload button
- Reboot your board: disconnect all power sources and reconnect to your computer.
Calibrate sensor¶
Now connect the battery to the battery sensor, if changes are done and battery module enabled you can see the display on PFD:

But values displayed are not accurate, we need to calibrate sensor!
Calculate SensorCalibration values¶
To configure the battery monitor, you need to calculate the SensorCalibration values.
For example, the documentation for Attopilot current sensor specifies the following information for each sensor type:
| Sensor type | Voltage sensitivity | Current sensitivity |
|---|---|---|
| 50V/180A | 63.69mV/Volt | 18.30mV / Amp |
| 50V/90A | 63.69mV/Volt | 36.60mV / Amp |
| 13.6V/45A | 242.3mV/Volt | 73.20mV / Amp |
In order to use 50V/90A you’ll have to do the following:
Convert everything to Volt, so Volt/Volt and Volt/Amp:
- 63.69mV/V / 1000 = 0.06369 V/V
- 36.60mV/A / 1000 = 0.0366 V/A
Then calculate the values to insert in Voltage and Current Factors:
- VoltageFactor = 1 / 0.06369 = 15.701
- CurrentFactor = 1 / 0.0366 = 27.322
Those factors are start values that can be adjusted later from readings, generally sensor’s sensitivity are not so accurate.
Setting FlightBatterySettings Properties¶
- Connect the board to your computer and go to the System tab in your GCS
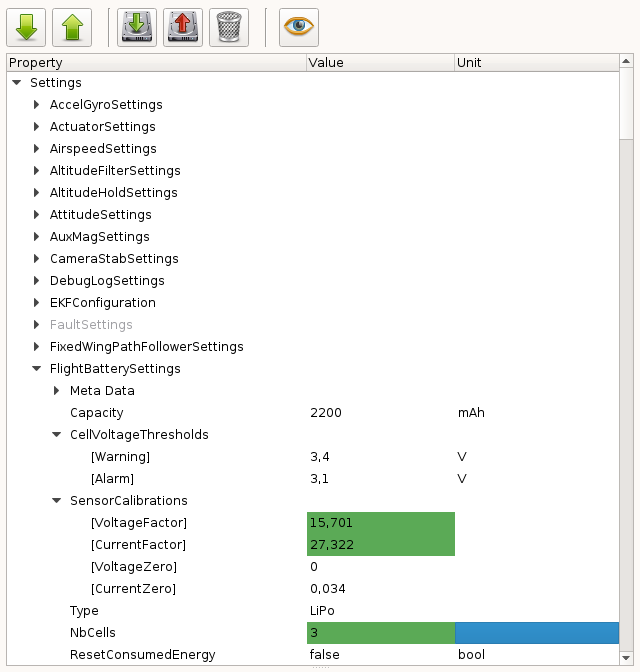
- Browse the first part (Settings) and find the FlightBatterySettings UAVObject
- Set the VoltageFactor and CurrentFactor as in the previous section.
- Set the cell Capacity if you want a warning to be issued when there are less than 2 minutes of flight time available; otherwise, set to 0.
- Set NbCells with the number of cells in series (2 for 2S, 3 for 3S, 3 for 3S2P)
- Set the Warning and Alarm thresholds if you would like a warning or critical alarm to be issued when going under the values that you specify.
- Save changes, click Upload button.
Note
Sometimes sensor are not accurate with small readings, especially for current. A CurrentZero setting can be set: without any load change this value to obtain a 0 ampers display.